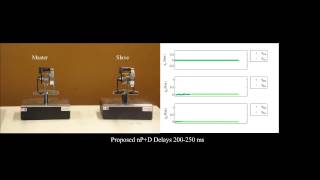
Media Summary: Bilateral Teleoperation with No Time Delay A novel control scheme is shown that guarantees global asymptotic stability of bilateral Work by Dr. Henghua Shen and Dr. Ya-Jun Pan @ Advanced Control and Mechatronics Lab, Dept. of Mechanical Engineering, ...
Time Delayed Teleoperation With Time - Detailed Analysis & Overview
Bilateral Teleoperation with No Time Delay A novel control scheme is shown that guarantees global asymptotic stability of bilateral Work by Dr. Henghua Shen and Dr. Ya-Jun Pan @ Advanced Control and Mechatronics Lab, Dept. of Mechanical Engineering, ... This is a collaborative project with DLR. We have demonstrated stable and transparent bilateral While the usefulness of haptic feedback in no- An adaptive non-singular terminal sliding mode (ANTSM) method is used for the motion tracking control of a bilateral ...
Energy-optimized Consensus Formation Control for Time-delayed Bilateral Teleoperation System of UAVs Time-Varying Communication Delays Lead to Vibrations During Teleoperation Stable Bilateral Teleoperation Control Method for Biped Robots with Time-Varying Delays Xiao Xu, Michael Panzirsch, Qian Liu, Eckehard Steinbach, Integrating Haptic Data Reduction with Energy Reflection-Based ... The latency introduced by the communication channel of a