Media Summary: Work by Dr. Henghua Shen and Dr. Ya-Jun Pan @ Advanced Control and Mechatronics Lab, Dept. of Mechanical Engineering, ... An adaptive non-singular terminal sliding mode (ANTSM) method is used for the motion tracking control of a This paper proposes a P+d like control scheme and calibration guidelines addressed to achieve stable dual coordination of force ...
Time Varying Delayed Bilateral Teleoperation - Detailed Analysis & Overview
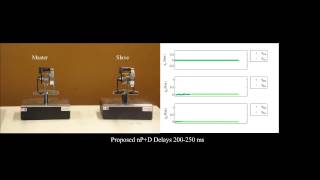
Work by Dr. Henghua Shen and Dr. Ya-Jun Pan @ Advanced Control and Mechatronics Lab, Dept. of Mechanical Engineering, ... An adaptive non-singular terminal sliding mode (ANTSM) method is used for the motion tracking control of a This paper proposes a P+d like control scheme and calibration guidelines addressed to achieve stable dual coordination of force ... Stable Bilateral Teleoperation Control Method for Biped Robots with Time-Varying Delays Check the presentation of last ICRA 2020 from our surgical and teleopration robots expert Prof. Chenguang Yang. Bilateral Teleoperation with No Time Delay
Time-Varying Communication Delays Lead to Vibrations During Teleoperation The main idea of these experiments is to demonstrate that a standard PID control provides a good performance and robustness in ... Tesis doctoral de Viviana Moya desarrollada en el INAUT (UNSJ-CONICET), San Juan, Argentina Director: Emanuel Slawiñski. What happens if one designs a controller without taking the network into account? A novel control scheme is shown that guarantees global asymptotic stability of