Media Summary: Stable Bilateral Teleoperation Control Method for Biped Robots with Time-Varying Delays An adaptive non-singular terminal sliding mode (ANTSM) This paper proposes a PD-like controller applied to the delayed
Stable Bilateral Teleoperation Control Method - Detailed Analysis & Overview
Stable Bilateral Teleoperation Control Method for Biped Robots with Time-Varying Delays An adaptive non-singular terminal sliding mode (ANTSM) This paper proposes a PD-like controller applied to the delayed Tesis doctoral de Viviana Moya desarrollada en el INAUT (UNSJ-CONICET), San Juan, Argentina Director: Emanuel Slawiñski. The executable offers you to experience the following three The aim of the experiment is to include the human operator in the
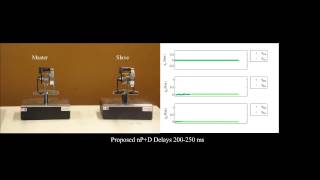
This paper analyzes the effect of time-varying delays on the setting of parameters of a P+d controller applied to delayed