Media Summary: The aim of the experiment is to include the human operator in the teleoperation loop in order to analyze performance of the Stable Bilateral Teleoperation Control Method for Biped Robots with Time-Varying Delays Energy-optimized Consensus Formation Control for Time-delayed Bilateral Teleoperation System of UAVs
Control Scheme For Delayed Bilateral - Detailed Analysis & Overview
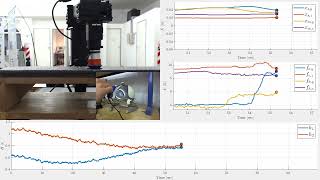
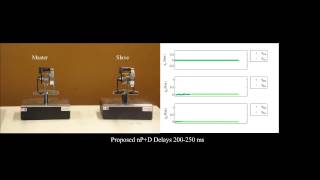
The aim of the experiment is to include the human operator in the teleoperation loop in order to analyze performance of the Stable Bilateral Teleoperation Control Method for Biped Robots with Time-Varying Delays Energy-optimized Consensus Formation Control for Time-delayed Bilateral Teleoperation System of UAVs An adaptive non-singular terminal sliding mode (ANTSM) method is used for the motion tracking The main idea of these experiments is to demonstrate that a standard PID This paper analyzes the effect of time-varying
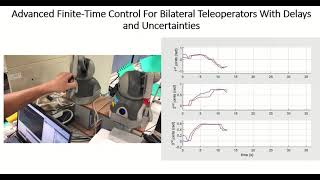
Teleoperation of manipulators has allowed extending the human skills to several areas, where the commands generated by a ... Accepted in the 22nd IFAC World Congress (Yokohama, Japan July 2023) Abstract - In this work, we address the problem of ... This work analyzes the effect of a non-passive human operator model in a Advanced Finite-Time Control For Bilateral Teleoperators With Delays and Uncertainties