Media Summary: Bilateral teleoperation with object-adaptive mapping Postgraduate Research Project 2014-2015 Department of Electrical Engineering University of Moratuwa Sri Lanka. Robots Controlling Robots - A New Perspective to
Bilateral Teleoperation With Object Adaptive - Detailed Analysis & Overview
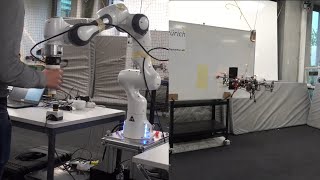
Bilateral teleoperation with object-adaptive mapping Postgraduate Research Project 2014-2015 Department of Electrical Engineering University of Moratuwa Sri Lanka. Robots Controlling Robots - A New Perspective to Bilateral Teleoperation with No Time Delay This is the accompanying video of our ICRA paper titled "Towards 6DoF Bilateral teleoperation system with Bandstop wave filtering
Work by Dr. Henghua Shen and Dr. Ya-Jun Pan @ Advanced Control and Mechatronics Lab, Dept. of Mechanical Engineering, ... Authors: Donghoon Baek, Amartya Purushottam, Jason J. Choi, Joao Ramos Paper: Motion mappings for continuous bilateral teleoperation