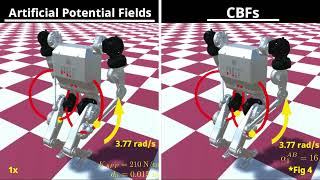
Media Summary: TUM Praktikum - Bau eines modularen Roboters (IN0012,IN2106, IN4231) YuMi running through a series of motions using the cognizant control software from Lula Real-Time Self-Collision Avoidance in Joint Space for Humanoid Robots
Self Collision Avoidance Modular Robot - Detailed Analysis & Overview
TUM Praktikum - Bau eines modularen Roboters (IN0012,IN2106, IN4231) YuMi running through a series of motions using the cognizant control software from Lula Real-Time Self-Collision Avoidance in Joint Space for Humanoid Robots More information available at: www.ros.org/wiki/multi_robot_collision_avoidance. This movie shows how Energid's Actin software can be used for complex, real-time path planning--allowing This demo displays the result of the internship at DLR. The goal is to validate a
We met with MIT graduate student Gregory Xie to get a first hand look at Auxbots, the untethered Columbia University researchers introduce a process that allows machines to “grow” physically by integrating parts from their ... PRISMA Lab research video experiments - Reactive The presented video material is a part of the 'Factory in a Day' project. The PR2 Fixed targets for both arms (yellow points); active Torque control allows safe interaction with humans and