Media Summary: Real-Time Self-Collision Avoidance in Joint Space for Humanoid Robots Full paper here This work was submitted to We present an approach for retartgeting off-the-shelf Virtual Reality (VR) trackers to effectively teleoperate an upper-body ...
Humanoid Self Collision Avoidance Using - Detailed Analysis & Overview
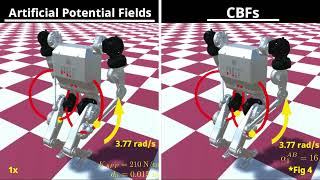
Real-Time Self-Collision Avoidance in Joint Space for Humanoid Robots Full paper here This work was submitted to We present an approach for retartgeting off-the-shelf Virtual Reality (VR) trackers to effectively teleoperate an upper-body ... Robonaut model, under Actin control, showing PRISMA Lab research video experiments - Reactive This work aims at combining state of the art developments of path planning and optimal control and to create the algorithmic ...
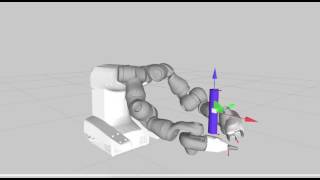
The method shown performs real-time trajectory optimization to let a This video is the supplementary material to our paper. In this work, we propose a data-driven approach for real-time Richard Cockburn Maclaurin Professor of Aeronautics and Astronautics Read full story here: Robot Manipulator's Dynamic Obstacle Avoidance