Media Summary: ICRA 2018 Spotlight Video Interactive Session Tue AM Pod G.2 Authors: Gao, Fei; WU, William; Lin, Yi; Shen, Shaojie Title: ... Status: IEEE International Conference on Robotics and Automation (ICRA) 2020 accepted. * Category: Multi-robot systems ... Status: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2019 accepted * Category: Multi-robot ...
Safe Trajectory Planning With Bernstein - Detailed Analysis & Overview
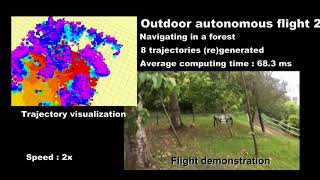
ICRA 2018 Spotlight Video Interactive Session Tue AM Pod G.2 Authors: Gao, Fei; WU, William; Lin, Yi; Shen, Shaojie Title: ... Status: IEEE International Conference on Robotics and Automation (ICRA) 2020 accepted. * Category: Multi-robot systems ... Status: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2019 accepted * Category: Multi-robot ... Optimization-based Receding Horizon Trajectory Planner using Bernstein Polynomials Towards Safe and Smooth Trajectory Planning for Robotic Navigation in Dynamic Environments Code available at: Simulation experiments with a ground robot using FASTER. Paper available ...
ICRA 2018 Spotlight Video Interactive Session Tue AM Pod G.8 Authors: Fridovich-Keil, David; Herbert, Sylvia; Fisac, Jaime F.; ... Code available here: Simulation experiments, and hardware experiments with two UAVs (up to 7.8 ... ION GNSS+ 2020 Akshay Shetty and Grace Gao For paper, slides, and additional NAV Lab publications: ... Reachable sets shown in grey on the plot to represent families of








![[Ground Robot Sim] FASTER: Fast and Safe Trajectory Planner for Flights in Unknown Environments](https://i.ytimg.com/vi/L13k44-krcc/mqdefault.jpg)

![[Extended Version] FASTER: Fast and Safe Trajectory Planner for Flights in Unknown Environments](https://i.ytimg.com/vi/fkkkgomkX10/mqdefault.jpg)


