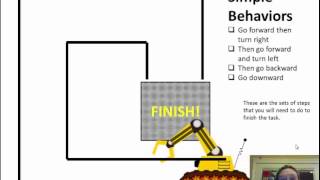
Media Summary: RSS2014 - Correct High-level Robot Behavior in Environments with Unexpected Events Quick Tutorial on Complex, Simple, and Basic This work presents a demo for automatically synthesizing and re-synthesizing a hybrid controller that
Guaranteed High Level Robot Behavior - Detailed Analysis & Overview
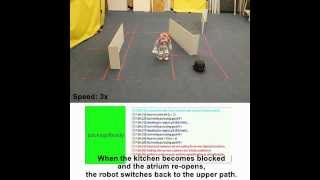
RSS2014 - Correct High-level Robot Behavior in Environments with Unexpected Events Quick Tutorial on Complex, Simple, and Basic This work presents a demo for automatically synthesizing and re-synthesizing a hybrid controller that Reinforcement learning - where the machines are taught to mimic humans - is how AI is trained. It aims to make the Hadas Kress- Gazit, Professor Sibley School of Mechanical and Aerospace Engineering, College of Engineering - Princeton April ... This video presents two experimental demonstrations of our approach to
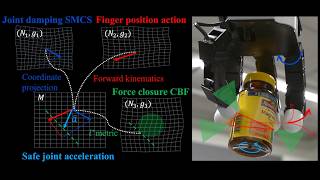
Self-Manipulation is a set of modeling choices that formally generate correct equations of motion across all contact conditions. China just dropped WoW — the world's first self-evolving world model that teaches