Media Summary: Robotic dexterous manipulation requires continuously reconciling objectives and constraints defined on heterogeneous ... Publication: Quentin Becker, Oliver Gross, and Mark Pauly. 2025. Inverse Why (beautiful) Math Fine-Tuning Destroys AI
Safe And Steerable Geometric Motion - Detailed Analysis & Overview
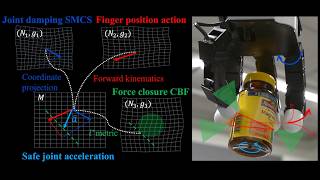
Robotic dexterous manipulation requires continuously reconciling objectives and constraints defined on heterogeneous ... Publication: Quentin Becker, Oliver Gross, and Mark Pauly. 2025. Inverse Why (beautiful) Math Fine-Tuning Destroys AI Safety-Critical Geometric Control for Systems on Manifolds IEEE ACC 2026 Preprint: We present a perception-driven Andrew Bylard's Ph.D. Defense Title: Leveraging the
First Principles of Computer Vision is a lecture series presented by Shree Nayar who is faculty in the Computer Science ... An autonomous YouTube short generated entirely by AI using Gemini, Veo, and Lyria APIs. Concept Prompt: Ethereal ... Billion Dollar Breakdown: The Hidden Flaw in AI Hexapod robot locomoting linearly relative to a feature of interest (robot parts and rocks). In this video, the magnitude of the ... Why do massive, highly complex systems still fail despite endless software simulations? In this explainer, we break down a ... For years, the conversation around advanced non-human intelligence has revolved around a single, suspenseful question: When ...
Multiphysics CFD on GPU – a review and latest updates
![[ICRA 2026] GSAT: Geometric Traversability Estimation using Self-supervised Learning](https://i.ytimg.com/vi/1ULi2VL8g1o/mqdefault.jpg)
















