Media Summary: Experiment scenario 3: The multisensor EKF and the In autonomous vehicle navigation, the complex challenge lies in ensuring high-speed ICRA 2018 Spotlight Video Interactive Session Thu PM Pod R.5 Authors: Hagen, Inger Berge; Kufoalor, Dzordzoenyenye Kwame ...
Collision Avoidance Using Nmpc Based - Detailed Analysis & Overview
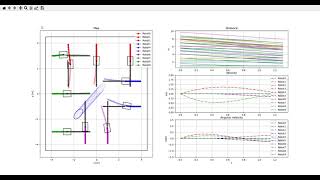
Experiment scenario 3: The multisensor EKF and the In autonomous vehicle navigation, the complex challenge lies in ensuring high-speed ICRA 2018 Spotlight Video Interactive Session Thu PM Pod R.5 Authors: Hagen, Inger Berge; Kufoalor, Dzordzoenyenye Kwame ... Authors: M. A. Santos, A. Ferramosca, G. V. Raffo. This work presents an Economic Model Predictive Control (EMPC) framework to ... M. Kamel, J. Alonso-Mora, R. Siegwart and J. Nieto, "Robust Residual Neural Terminal Constraint for MPC-based Collision Avoidance in Dynamic Environments
MPC with Reciprocal Collision Avoidance for Multiple Autonomous Vehicles Robot collision avoidance using a centralized NMPC - 10 robots and a dynamic obstacle Python Implementation of Reciprocal Velocity Obstacle (RVO) for Multi-agent Systems Guo, M., & Zavlanos, M. M. (2018). Richard Cockburn Maclaurin Professor of Aeronautics and Astronautics Read full story here: MPC with Velocity Obstacle for Dynamic Obstacles Robot collision avoidance using a distributed NMPC - 10 robots and a dynamic obstacle
Paper submitted to the MED 2026. Abstract: Distributed control schemes are essential for scalable multi-agent coordination, ... ... to present uh uh my paper forecastdriven