Media Summary: Postgraduate Research Project 2014-2015 Department of Electrical Engineering University of Moratuwa Sri Lanka. Controlling Kuka iiwa Robot with different modes via Touch The Kinova Gen 3 robotic manipulator, a lightweight and portable platform, when integrated with the highly accurate and ...
Bilateral Teleoperation Haptic System - Detailed Analysis & Overview
Postgraduate Research Project 2014-2015 Department of Electrical Engineering University of Moratuwa Sri Lanka. Controlling Kuka iiwa Robot with different modes via Touch The Kinova Gen 3 robotic manipulator, a lightweight and portable platform, when integrated with the highly accurate and ... ESA astronaut Luca Parmitano is aboard the International Space Station (ISS) operating a robot on earth using a sigma.7 Undergraduate Student Project Department of Electrical Engineering University of Moratuwa Sri Lanka. An adaptive non-singular terminal sliding mode (ANTSM) method is used for the motion tracking control of a
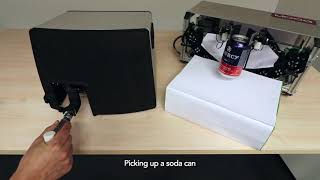
Bilateral teleoperation with object-adaptive mapping Work by Dr. Henghua Shen and Dr. Ya-Jun Pan @ Advanced Control and Mechatronics Lab, Dept. of Mechanical Engineering, ... github.com/OltanS/UR5e_Touch_haptic_teleoperation. 2013 IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, May 6-10, 2013.