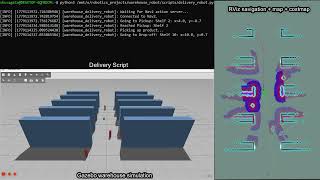
Media Summary: In this work, we study the effects that perception latency has on the maximum speed a robot can reach to safely navigate through ... Features Demonstrated: Autonomous warehouse navigation Shelf-to-shelf delivery missions This work was carried out by Bradley Kohler, Ya-Jun Pan and Robert Bauer at the Advanced Control and Mechatronics Lab, ...
Vox Nav Dynamic Obstacle Avoidance - Detailed Analysis & Overview
In this work, we study the effects that perception latency has on the maximum speed a robot can reach to safely navigate through ... Features Demonstrated: Autonomous warehouse navigation Shelf-to-shelf delivery missions This work was carried out by Bradley Kohler, Ya-Jun Pan and Robert Bauer at the Advanced Control and Mechatronics Lab, ... Dynamic Obstacle Avoidance with a Vision-Guided MAV Quadruped navigation with dynamic obstacle collision avoidance This video explains the basics of SLAM (Simultaneous Localization and Mapping), how a LIDAR sensor works, frontier exploration ...
This project is Group 667's Robotics Bachelor's Thesis from Aalborg University. The project was focused on creating a robot which ... Replanning of the path (green) from the UGV (does not drive due to simplicity) to the navigation goal (red arrow) using Dijkstra's ... Watch Microsoft Build 2026 Day 1 live from San Francisco! What's happening: Imagine Cup 2026 winners announced ... The video shows the navigation of a robot in a real unstructured environment. vox_nav; A navigation system for outdoor robotics in ... Hey everyone. Coming back after a while now! In this video, I have upgraded the most requested, Navmesh query-based ... Dan Bisceglia, Director of Product Management at VOXX ADAS, sits down with CMA Networks to give an honest review of how AI ...