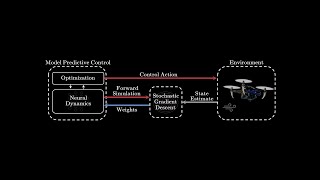
Media Summary: A large part of the success of supervised machine Model-based control requires an accurate model of the system dynamics for precisely and safely controlling the robot in complex ... Authors: Niklas Penzel, Christian Reimers, Clemens-Alexander Brust, Joachim Denzler Abstract:
Uncertainty For Active Learning On - Detailed Analysis & Overview
A large part of the success of supervised machine Model-based control requires an accurate model of the system dynamics for precisely and safely controlling the robot in complex ... Authors: Niklas Penzel, Christian Reimers, Clemens-Alexander Brust, Joachim Denzler Abstract: Recent years have witnessed a surge of successful applications of machine reading comprehension. Of central importance to the ... Luiza Ribeiro Marnet presents her work that was published at Robovis 2024, read the full paper here: ... A short video on what the above paper discusses: -
PT4AL: Using Self-Supervised Pretext Tasks for Active Learning (ECCV 2022)






![Uncertainty-Based Active Learning for Reading Comprehension [TMLR]](https://i.ytimg.com/vi/oRrMip1MWbY/mqdefault.jpg)