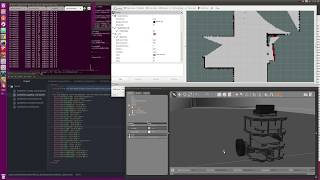
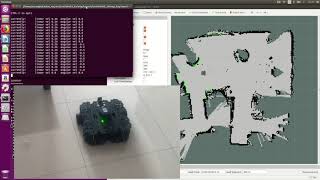
Media Summary: 환경 : ROS2_foxy, ubuntu20.04, rviz2 머신 : How to Create the Map using SLAM in turtlebot3 ( Realtime) In this video, we dive into robot localization and autonomous
Turtlebot3 Slam Navigation Package - Detailed Analysis & Overview
환경 : ROS2_foxy, ubuntu20.04, rviz2 머신 : How to Create the Map using SLAM in turtlebot3 ( Realtime) In this video, we dive into robot localization and autonomous ROS Navigation with turtlebot3 simulation. Continuing my journey in Robotics Simulation! As the next step in my exploration, I worked on Simultaneous Localization and ... A demonstration of how we can use the Turtlebot simulator in ROS to create a map of an environment in gmapping and use the ...