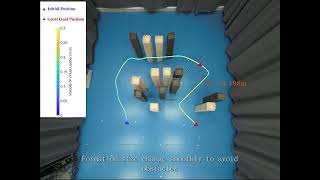
Media Summary: Prescribed-Time Bearing-Based Time-Varying Formation Control for Multi-Agent System This video demonstrates a practical scenario in which the The follower UGVs, labeled 1, 2, and 3, achieve
Time Varying Formation Control For - Detailed Analysis & Overview
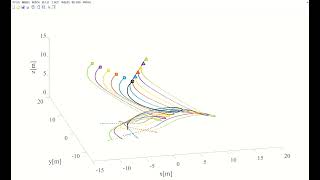
Prescribed-Time Bearing-Based Time-Varying Formation Control for Multi-Agent System This video demonstrates a practical scenario in which the The follower UGVs, labeled 1, 2, and 3, achieve Time-varying formation control of multi-UAV with tree network Time-varying formation control for multiple UAV systems Time-varying Formation Planning and Distributed Control for Multiple UAVs in Clutter Environment
We are providing a Final year IEEE project solution & Implementation with in short Experiment video for the article under review "Fast 基于滑模控制方法的多无人机系统编队跟踪控制问题研究的Gazebo-ROS仿真视频。论文题目是《Distributed Sliding Mode