Media Summary: USENIX Security '22 - DoubleStar: Long-Range Attack Towards Depth Estimation Status: IEEE Transactions on Industrial Electronics, 2024, accepted (Impact Factor: 7.5, Top 2.3%) * Title: Stereo Camera Autonomous Navigation: Obstacle Avoidance & Path-Planning
Stereo Camera Based Uav Obstacle - Detailed Analysis & Overview
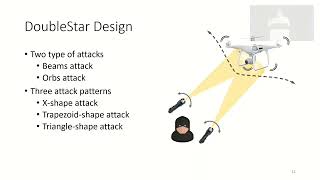
USENIX Security '22 - DoubleStar: Long-Range Attack Towards Depth Estimation Status: IEEE Transactions on Industrial Electronics, 2024, accepted (Impact Factor: 7.5, Top 2.3%) * Title: Stereo Camera Autonomous Navigation: Obstacle Avoidance & Path-Planning In this work, we study the effects that perception latency has on the maximum speed a robot can reach to safely navigate through ... We're not earning from YouTube yet — your support helps us fuel new projects, buy costly SMP Robotics mobile robots are equipped with two pairs of
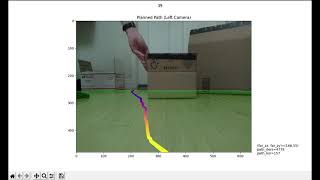
This project studies and implements an algorithm for depth reconstruction from a Demo video in which I explain and demonstrate a This paper presents a comprehensive integration of existing technologies for autonomous robot path planning, with a specific ... Institut für Automatisierungstechnik (IAT), Universität Bremen (ROS, OpenCV, Prototype Autonomous Vehicle Robot - Series of Demonstrations of basic navigation functions. In this video, we have ... Collision avoidance for AGV using local path planning based on stereo camera
This work has been done in the context of a project at the University of Karlsruhe. Two


![[IMPLEMENTING] A 3D-MoDeT version using stereo camera (3D multi-obstacle tracking)](https://i.ytimg.com/vi/bi42fB3EfWA/mqdefault.jpg)