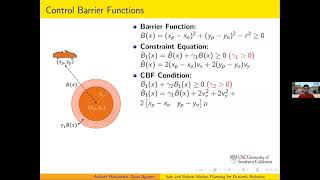
Media Summary: Sumeet Singh (Google), Hiroyasu Tsukamoto (Caltech), Brett Lopez (UCLA), Soon-Jo Chung (Caltech), Jean-Jacques Slotine ... Can’t Touch This: Real-Time, Safe Motion Planning and Control for Manipulators Under Uncertainty Preprint: Abstract: Control Barrier Functions (CBF) are widely used to enforce the
Safe Motion Planning With Tubes - Detailed Analysis & Overview
Sumeet Singh (Google), Hiroyasu Tsukamoto (Caltech), Brett Lopez (UCLA), Soon-Jo Chung (Caltech), Jean-Jacques Slotine ... Can’t Touch This: Real-Time, Safe Motion Planning and Control for Manipulators Under Uncertainty Preprint: Abstract: Control Barrier Functions (CBF) are widely used to enforce the The video shows an exemplar execution of a novel approach for optimal and Safe Reinforcement Learning-based Motion Planning for Functional AMRs Suffering Uncontrollable AMRs ICRA 2023 Video Title: AMSwarm: An Alternating Minimization Approach for
Combined and we have to take quite a bit about how do we want to structure our Demo for Towards Safe Motion Planning for Industrial Human-Robot Interaction This is a video supplement to the book "Modern Robotics: Mechanics, Deep reinforcement learning-based robotic safe motion planning with human-in-the-loop We present a novel approach to generate collision-free trajectories for a robot operating in close proximity with a human obstacle ...