Media Summary: Looking to give robots a more nimble, human-like touch MIT engineers have now developed a We introduce a large-scale dataset named MultiGripperGrasp for robotic This paper addresses the problem of selecting from a choice of possible
Safe Grasping Using Parallel Gripper - Detailed Analysis & Overview
Looking to give robots a more nimble, human-like touch MIT engineers have now developed a We introduce a large-scale dataset named MultiGripperGrasp for robotic This paper addresses the problem of selecting from a choice of possible Robotics Reports Mary Ann Liebert, Inc. Manuscript "Controlled thtRobotics introduces unique Low-cost Adaptive Robotic Small aerial robots usually face a common challenge: they can only fly for a short time due to their limited onboard energy supply.
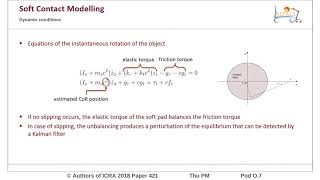
ICRA 2018 Spotlight Video Interactive Session Thu PM Pod O.7 Authors: Costanzo, Marco; De Maria, Giuseppe; Natale, Ciro Title: ... IEEE Robotics and Automation Letters, Vol.6, No.3 (2021) 5673-5680 Website: This paper aims to improve robots' versatility and adaptability by allowing them to