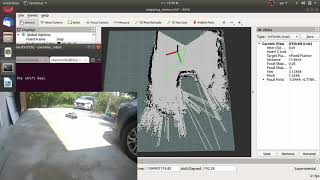
Media Summary: ... ・gmapping(LIDAR + wheel odometry) : ・ UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file". Hardware and software setup: - RPLiDAR A1 LiDAR - Omni robot chassis -
Ros Slam Testing - Detailed Analysis & Overview
... ・gmapping(LIDAR + wheel odometry) : ・ UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file". Hardware and software setup: - RPLiDAR A1 LiDAR - Omni robot chassis - Using Arduino as base controller, PID control for motors, fusing encoders and IMU signals with extended kalman filter, and ... Thanks to Jane Street for their support... Check out internships here: More links & stuff in full ... RTAB-Map (Real-Time Appearance-Based Mapping) is a RGB-D












![[ROS tutorial] RTAB-Map in ROS 101](https://i.ytimg.com/vi/gJz-MWn7jhE/mqdefault.jpg)