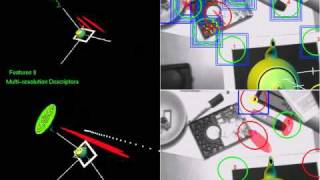
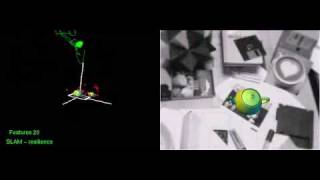
Media Summary: Summary of Research by Denis Chekhlov investigating resilience to erratic motion and camera kidnapping while exploring a ... Our method is available in high-dynamic environments! :) Sensor configuration: Azure Kinect (an RGB-D camera), RP-LiDAR (a ... autonomousvehicles VISUAL ODOMETRY. Explore
Robust Real Time Slam Using - Detailed Analysis & Overview
Summary of Research by Denis Chekhlov investigating resilience to erratic motion and camera kidnapping while exploring a ... Our method is available in high-dynamic environments! :) Sensor configuration: Azure Kinect (an RGB-D camera), RP-LiDAR (a ... autonomousvehicles VISUAL ODOMETRY. Explore Accompanying video for: "Multiple Relative Pose Graphs for This video provides some intuition around Pose Graph Optimization—a popular framework for solving the simultaneous ... This is the accompanying video for the following paper: Xieyuanli Chen, Huimin Lu, Junhao Xiao, Hui Zhang, Pan Wang.
Video demonstrating an autonomous underwater inspection where the robot updates its plan when tracking of visual features is ...




![[CVPR 2025] MASt3R-SLAM: Real-Time Dense SLAM with 3D Reconstruction Priors](https://i.ytimg.com/vi/wozt71NBFTQ/mqdefault.jpg)












