Media Summary: Mikel Sagardia, Alexander Martín Turrillas, Thomas Hulin Institute of Robotics and Mechatronics German Aerospace Center ... Real-Time Collision Avoidance using Bio IK Reach Control improves the effectiveness, accuracy and control of Reach System manipulators. It packages an intuitive HMI with ...
Real Time Collision Avoidance Software - Detailed Analysis & Overview
Mikel Sagardia, Alexander Martín Turrillas, Thomas Hulin Institute of Robotics and Mechatronics German Aerospace Center ... Real-Time Collision Avoidance using Bio IK Reach Control improves the effectiveness, accuracy and control of Reach System manipulators. It packages an intuitive HMI with ... Two teams of 5 robots playing in RoboCup MSL league are simulated, each player has to move to a different place every 4 ... In this video, I present my complete ROS2 port and optimization of the Falco algorithm - a fast likelihood-based YuMi running through a series of motions using the cognizant control
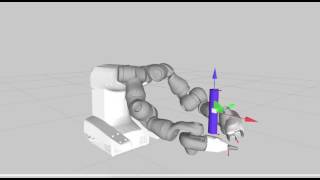
Project demonstrated by Sanjukta Ghatak [Reg No: 221170110209, Roll: 11700322027] , Subhadeep Sen [Reg No: ... Real-Time Collision Avoidance on the KuKA LWR iiwa using Bio IK As machines become more complex, involving additional axes, automation and setup changing, ... iREX 2019 - Yutaka / Johnan / Realtime Robotics - Robot Coordination and Collision Avoidance In this video, we demonstrate a smart Obstacle Detection System using Arduino and TDCI (Target Device Communication ... For robotic camera control, Actin coordinates the control of multiple robots to maintain an optimal subject matter camera view ...