Media Summary: Supplementary video for the IROS 2023 paper "Differentiable ... Autonomous Systems: - Sampling-Based Algorithms for MIT - April 12, 2024 Speaker: Florian Shkurti Seminar title: Learning to Plan and Perceive for
Optimal Task And Motion Planning - Detailed Analysis & Overview
Supplementary video for the IROS 2023 paper "Differentiable ... Autonomous Systems: - Sampling-Based Algorithms for MIT - April 12, 2024 Speaker: Florian Shkurti Seminar title: Learning to Plan and Perceive for 3rd Summer School on Cognitive Robotics 7/19/2019 Need to get to your goal quickly? Ensure you plan the right path! Robots need to work out how to get from here to there somehow! MIT - February 21, 2025 Speaker: Zac Manchester Seminar title: Composable Optimization for Robotic
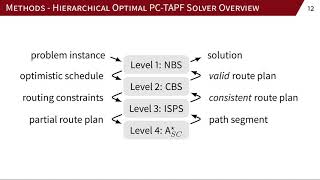
T-RO King-Sun Fu Award Honorable Mention paper entitled “ Recorded video of the presentation given at the IEEE/RSJ International Conference in Intelligent Robots and Systems 2023 in ... Efficient and Robust Predicate Learning from Demonstration for AI-enabled robotics, autonomous agents, collaborative robotics, heterogeneous multiagent systems, An enduring goal of AI and robotics has been to build a robot capable of robustly performing a wide variety of This video describes a novel hierarchical algorithm for solving Precedence-Constrained Multi Agent
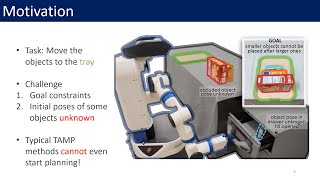
This video shows a demonstration of a general