Media Summary: In this paper, we give a double twist to the problem of See the other videos in this series: This video ... Embedded System Class Project. Implement A*
Obstacle Aware Path Planning - Detailed Analysis & Overview
In this paper, we give a double twist to the problem of See the other videos in this series: This video ... Embedded System Class Project. Implement A* robotics It takes a significant amount of time and ... ROS Implementation Robot: Husky Clearpath. This is a complimentary video to the paper: Yakovlev K., Andreychuk A. Towards Time-Optimal Any-Angle
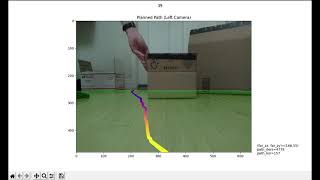
This Demo is performed by partners in System Arch. Research Dept., R&D Div.. When our task environment changes, if this ... Stereo Camera Autonomous Navigation: Obstacle Avoidance & Path-Planning robotics It takes a significant amount of time and energy to create these free video ... This code was developed on matlab The pink region shows sensing region Black is the actual robot position Red is the danger ... The supplemental video of our (Naderi, Rajamäki, Hämäläinen) Motion in Games 2015 paper about a novel RRT-extension for ... Code: Paper: Abstract: This paper presents PANTHER, ...
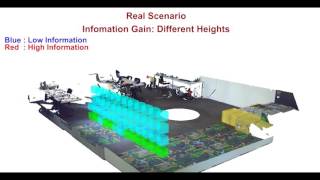
ICRA 2018 Spotlight Video Interactive Session Thu AM Pod K.1 Authors: Perez-Higueras, Noe; Caballero, Fernando; Merino, Luis ... Get instant access to MATLAB & Simulink books, guides, and course files to boost your skills! Get Access Now: ... In this paper, we propose a new environment model for legged robots. The model stores information about the shape of the ...






![[2021] Towards Time-Optimal Any-angle Path Planning With Dynamic Obstacles :: Demo](https://i.ytimg.com/vi/k245e3CMUO4/mqdefault.jpg)