Media Summary: We combine the scalability of the MAPF algorithm LaCAM Justin Kottinger, Shaull Almagor, and Morteza Lahijanian, "MAPS-X: Explainable This video shows the results of our paper titled "DoS-Resilient
Multi Robot Motion Planning Using - Detailed Analysis & Overview
We combine the scalability of the MAPF algorithm LaCAM Justin Kottinger, Shaull Almagor, and Morteza Lahijanian, "MAPS-X: Explainable This video shows the results of our paper titled "DoS-Resilient Spatial and Temporal Splitting Heuristics for Organization, Introduction, Problem Formulation See This video accompanies the paper entitled "Rule-Based Lloyd Algorithm for
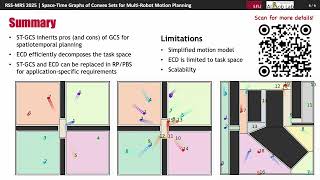
Hierarchical Temporal Logic Task and Motion Planning for Multi Robot Systems This video accompanies the paper entitled "Distributed Nonlinear Trajectory Optimization for Talk by Dror Dayan in TAU CG seminar - 12/8/2021. Jingtao Tang, Zining Mao, Lufan Yang, and Hang Ma, "Space-Time Graphs of Convex Sets for
![Multi-Robot Planning [Lecture, Marija Popović]](https://i.ytimg.com/vi/Wcvw8qyUan8/mqdefault.jpg)