Media Summary: This vidoe is a result for a SITL test applying Multi-Objective Coverage Control of Multi-Agent Systems Handling simultaneous faults in convex environment.
Multi Agent Area Coverage Distributed - Detailed Analysis & Overview
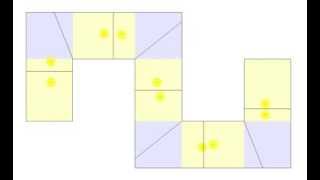
This vidoe is a result for a SITL test applying Multi-Objective Coverage Control of Multi-Agent Systems Handling simultaneous faults in convex environment. Then let's look at the plot as the right hand side so in this case the A mechanism is proposed to influence the behavior of a group of robots by using We present a decentralized ergodic control policy for time-varying
This video presents the simulation results of the paper titled " Pham Duy Hung and Trung Dung Ngo www.morelab.org Convex and non-convex structured environments. Demonstration video showing autonomous vehicles making physical power connections in a simulated disaster field. Multi-Agent Coverage with Energy Constrained Agents - Decentralized Control Implementation of a Super Twisting controller for Michigan - Applied Generative AI Specialization ...