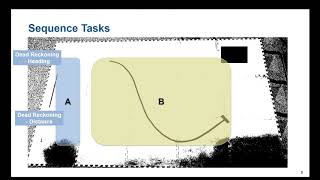
Media Summary: This video is part of the course CSE360-460 Introduction to Localization and Mapping, odometry based localization, dead reckoning based localization, map based localization, Kalman filter ... Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ...
Mobile Robotics C5 Robot Navigation - Detailed Analysis & Overview
This video is part of the course CSE360-460 Introduction to Localization and Mapping, odometry based localization, dead reckoning based localization, map based localization, Kalman filter ... Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ... Watch as multiple MiR AMR units travel around – and adjust automatically – without human intervention. In many scenarios, like industrial environments, it's very common that multiple Learn how to design a supervisory logic that navigates a
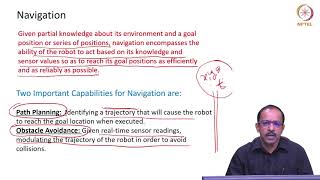
This video explains the basics of SLAM (Simultaneous Localization and Mapping), how a LIDAR sensor works, frontier exploration ... This video shows local and global costmaps visualized in ROS and RViz. The costmaps are used by the move_base node as part ... This video is about the navigation2 in ros2. We will cover 1. Overview of Navigation2 2. Understanding the concept of Behavior ... In this video I have shown the working of Autonomous The A012plus is an excellent solution for The Autonomy Research Kit (ARK) is an all-in-one autonomy kit that enables robust point-to-point autonomous