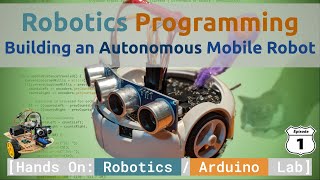
Media Summary: Used components: 1. LIDAR - Piccolo Laser Distance Sensor 2. Gyro - MPU6050 3. Encoder 4. Pirate - 4WD This is the first lab video in my hands on beginners Localization and Mapping, odometry based localization, dead reckoning based localization, map based localization, Kalman filter ...
Mobile Robot Setup For On - Detailed Analysis & Overview
Used components: 1. LIDAR - Piccolo Laser Distance Sensor 2. Gyro - MPU6050 3. Encoder 4. Pirate - 4WD This is the first lab video in my hands on beginners Localization and Mapping, odometry based localization, dead reckoning based localization, map based localization, Kalman filter ... In this video, you can identify the components necessary for building the In this video, you can learn how to get started with the LD-250, from unboxing the Research Paper Video illustrating the design and construction of a low-cost open-source