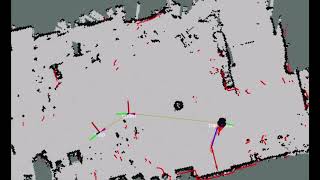
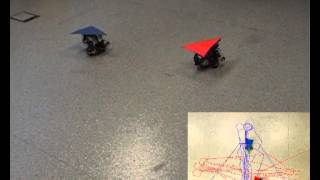
Media Summary: This video is a demonstration of the Potential fields method for MCAL_P : Mobile robot Collision Avoidance Learning with Path This video presentation describes the work in the paper titled:
Mcal P Mobile Robot Collision - Detailed Analysis & Overview
This video is a demonstration of the Potential fields method for MCAL_P : Mobile robot Collision Avoidance Learning with Path This video presentation describes the work in the paper titled: To navigation on the complex environment, the Deep Reinforcement Learning can be attractive method better than classical ... Collision avoidance between mobile robot and human Multi-Agent Systems for Collision Avoidance Mission of Mobile Robots
Obstacle avoidance node can detect object higher than the height of RPLidar. This node is used to avoid clashing into unknown ... This paper proposes combining displacement-based and distance-based approaches to design a strategy for regulation control ... In this video, we deal with the issue of detecting The resilience nonlinear model predictive control is used to reach the goal of formation containment control in search and rescue ... Mobile Robot Simulation for Collision Avoidance with Simulink ME20B2001 Vishnu Kumar Submitting to kshoonya. Preliminary task.
Implementation of image processing, object detection and control algorithms on our Mobile manipulators are comprised of one or more robotic arms attached to a