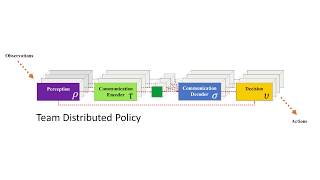
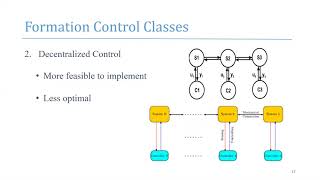
Media Summary: In this final video, the speaker discusses the difference between centralized and Effective communication is required for teams of robots to solve sophisticated collaborative tasks. In practice it is typical for both ... Don't forget to like and subscribe!! Part 2 that considers Formation control structures (Leader-Follower, Virtual,.
Learning Decentralized Policies In Multiagent - Detailed Analysis & Overview
In this final video, the speaker discusses the difference between centralized and Effective communication is required for teams of robots to solve sophisticated collaborative tasks. In practice it is typical for both ... Don't forget to like and subscribe!! Part 2 that considers Formation control structures (Leader-Follower, Virtual,. Many real-world problems, such as network packet routing and the coordination of autonomous vehicles, are naturally modelled ... Ready to become a certified watsonx AI Assistant Engineer? Register now and use code IBMTechYT20 for 20% off of your exam ... Abstract: Over the past few decades, we have seen artificial intelligence (AI) achieve superhuman performance in several ...
00:00 Introduction & what is SLAM? 00:57 Focus on minimizing data exchange. 02:49 System overview 04:02 Making ... This course was given by Stefano V. Albrecht and has been organised by the Artificial Intelligence Research Institute (IIIA -CSIC) ... Alex Lin (UCLA), Mark Debord (NAVAIR); Gary Hewer (NAVAIR); Katia Estabridis (NAVAIR); Guido F Montufar (UCLA / Max ...