Media Summary: [CVPR2026] Event6D: Event-based Novel Object 6D Pose Tracking Describing various model structures and measuring performance. Source Code ( Junyang Lin Scaling Model Size and Context Length Towards Intelligence
Jun Yang On 6d Pose - Detailed Analysis & Overview
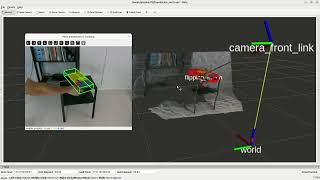
[CVPR2026] Event6D: Event-based Novel Object 6D Pose Tracking Describing various model structures and measuring performance. Source Code ( Junyang Lin Scaling Model Size and Context Length Towards Intelligence Credit to: ammar-n-abbas/FoundationPoseROS2 Adopted and Improved for custom model detection. Only a depth camera, ... Deep Fusion for multi-modal 6D Pose Estimation Authors: Chen Song, Jiaru Song, Qixing Huang Description: We introduce HybridPose, a novel
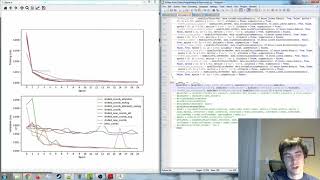
Supplementary video submission. Project website: Abstract: Warehouse automation ... Ubuntu 18.04 / ROS Melodic / USB Camera / RGB-D Camera ( Intel Realsense D435 ) [dataset_size 20k] [batchsize 32] [epochs ... paper: code: abstract: Most self-supervised We show some augmented reality images and video sequences that were produced using our Get FREE Robotics & AI Resources (Guide, Textbooks, Courses, Resume Template, Code & Discounts) – Sign up via the pop-up ... MyungHwan Jeon and Ayoung Kim, PrimA6D: Rotational Primitive Reconstruction for Enhanced and Robust
Authors: Yinlin Hu, Pascal Fua, Wei Wang, Mathieu Salzmann Description: Most recent


![[CVPR2026] Event6D: Event-based Novel Object 6D Pose Tracking](https://i.ytimg.com/vi/EVSg7dcL5Zs/mqdefault.jpg)