Media Summary: This video explains how to implement robot Nonlinear model predictive control (NMPC) is employed to regulate the position and yaw of the quadrotor relative to a ground ... Bringing robotics and vision together! This video demonstrates an innovative control technique where a camera, mounted on a ...
Image Based Visual Servoing For - Detailed Analysis & Overview
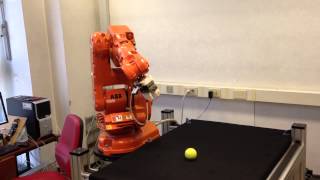
This video explains how to implement robot Nonlinear model predictive control (NMPC) is employed to regulate the position and yaw of the quadrotor relative to a ground ... Bringing robotics and vision together! This video demonstrates an innovative control technique where a camera, mounted on a ... This video is the internal view of the camera used to Robust Image-Based Visual Servoing with Field-of-View Constraints Preliminary test PBVS contro of an ABB IRB140 using OpenCV.
To bring about a new era in industrial robotics by overcoming challenges such as high costs, restrictive environment, and safety ... The problem of how to effectively track and intercept small aircraft that break into the no-fly zones is now attracting increasing ... This video is a media attachment to the following paper: "A New Method for Solving 6D A demonstration of a control method known as