Media Summary: Ruben Mascaro Palliser, Lucas Teixeira, Timo Hinzmann, Roland Siegwart, Margarita Chli. " ICRA 2018 Spotlight Video Interactive Session Tue PM Pod B.2 Authors: Mascaro Palliser, Ruben; Teixeira, Lucas; Hinzmann, ... The Harvard SEAS REACT Laboratory, headed by Professor Stephanie Gil, presents a novel framework for collaboration amongst ...
Gomsf Graph Optimization Based Multi - Detailed Analysis & Overview
Ruben Mascaro Palliser, Lucas Teixeira, Timo Hinzmann, Roland Siegwart, Margarita Chli. " ICRA 2018 Spotlight Video Interactive Session Tue PM Pod B.2 Authors: Mascaro Palliser, Ruben; Teixeira, Lucas; Hinzmann, ... The Harvard SEAS REACT Laboratory, headed by Professor Stephanie Gil, presents a novel framework for collaboration amongst ... This video provides some intuition around Pose By Weisong Wen, Tim Pfeifer, Xiwei Bai, Li-Ta Hsu Factor Active Rendezvous for Multi-Robot Pose Graph Optimization using Sensing over Wi-Fi, MRTA RSS 2020
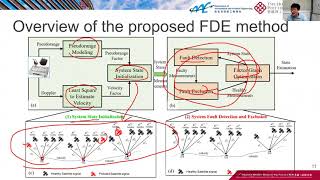
Presented in ION GNSS+ 2021: Fault detection and exclusion (FDE) is significant for integrity monitoring of GNSS positioning for ... This video showcases experiments for our recent paper entitled " The execution of flight missions by unmanned aerial vehicles (UAV) primarily relies on navigation. In particular, the navigation ... In this video we introduce Kruskal's algorithm for finding minimal spanning trees, and the Tree Shortcut Algorithm for solving the ... For more information about Stanford's Artificial Intelligence professional and graduate programs, visit: A research project in progress in our lab. This project is going for development of real-time lidar
This video is part of an online course, Intro to Artificial Intelligence. Check out the course here: ... MIT 6.172 Performance Engineering of Software Systems, Fall 2018 Instructor: Julian Shun View the complete course: ...