Media Summary: Dynamic Obstacle Avoidance for CDPRs with Mobile Bases via Sim-to-Real Reinforcement Learning In this tutorial I did several experiments to train a robot to avoid A demonstration of manipulation on-the-move in a complex environment with
Dynamic Obstacle Avoidance For Mobile - Detailed Analysis & Overview
Dynamic Obstacle Avoidance for CDPRs with Mobile Bases via Sim-to-Real Reinforcement Learning In this tutorial I did several experiments to train a robot to avoid A demonstration of manipulation on-the-move in a complex environment with The goal for this effort is to develop a vision-based robotic system that allows a MPC with Velocity Obstacle for Dynamic Obstacles NOVAMOB: Test 6: Dynamic Obstacle Avoidance using GPS
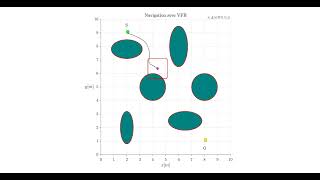
We propose a novel shared control strategy for Capstone by Eromosele Okosun, Emmanuel Eme, Victor Oladeinde, Maximillian Fakrogha Supervisor: Dr. Jing Ren. In this work, we study the effects that perception latency has on the maximum speed a robot can reach to safely navigate through ... In this video, we explore the VFH (Vector Field Histogram) algorithm, a popular method for fast and efficient Get instant access to MATLAB & Simulink books, guides, and course files to boost your skills! Get Access Now: ... This is the implementation of time scaled
More info: git.com:GPrathap/trajectory-tracker.git. NODE.move provides an advanced autonomous navigation for Obstacle Avoidance using Lidar with Dynamic Obstacle on Gazebo Simulation This video demonstrates how the robot, UGV (Unmanned Ground Vehicle) can detect and avoid any This video is a demonstration of the Deep Reinforcement Learning Policies from the paper "Comparison of Deep Reinforcement ...