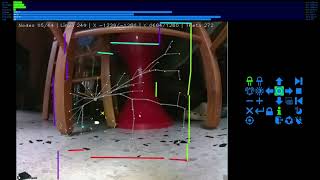
Media Summary: This video demonstrates a fully interactive visual simulation of the Implementation of Dijkstra on a rigid robot By utilizing image processing, graph theory and shortest path finding
Dijkstra S Algorithm Realtime Robotic - Detailed Analysis & Overview
This video demonstrates a fully interactive visual simulation of the Implementation of Dijkstra on a rigid robot By utilizing image processing, graph theory and shortest path finding we explain the concept step-by-step with clear examples so beginners can easily understand how the Implemented a closed-loop feedback obstacle avoidance system with Mapping robot. Using dijkstra to find path
You can download the starter code files required for this lab here: ... In this episode I talk about the modification to the In this Live Class, we will learn some path planning basic concepts, focusing on one of the most famous