Media Summary: Supplemental material for ICRA 2018 submission. ICRA 2018 Spotlight Video Interactive Session Tue AM Pod F.1 Authors: Culbertson, Preston; Schwager, Mac Title: IROS 2023 presentation for the paper "Hierarchical
Decentralized Adaptive Control For Collaborative - Detailed Analysis & Overview
Supplemental material for ICRA 2018 submission. ICRA 2018 Spotlight Video Interactive Session Tue AM Pod F.1 Authors: Culbertson, Preston; Schwager, Mac Title: IROS 2023 presentation for the paper "Hierarchical Scalable Multi-Robot Collaboration with LLMs: Centralized or Decentralized Systems? (ICRA 2024) Lei Yan, Theodoros Stouraitis and Sethu Vijayakumar, Lei Yan, Theodorous Stouraitis and Sethu Vijayakumar,
Hierarchical Adaptive Control for Collaborative Manipulation of a Rigid Object by Quadrupedal Robots Paper: Petitti A, Franchi A, Di Paola D, Rizzo A. Peimannm.sdsu.edu Pls see our paper at ASME DSMC for more details: ... Authors: Roberto Castro Sundin, Pedro Roque, Dimos V. Dimarogonas. Presented at: 39th IEEE International Conference on ... Conference: IROS 2022 Paper link: In this work, we introduce an Ever wondered how robots manage to perform complex tasks flawlessly even when their surroundings keep changing? Dive into ...
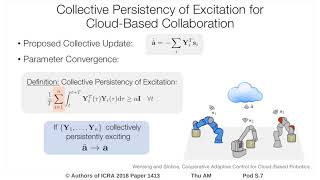
ICRA 2018 Spotlight Video Interactive Session Thu AM Pod S.7 Authors: Wensing, Patrick; Slotine, Jean-Jacques E. Title: ... Conference: RO-Man 2022 Paper link: This work proposes a novel framework ... We propose a system solution to achieve data-efficient, Ever wondered how robots handle unexpected changes and learn to adapt? This video dives into the fascinating world of ...