Media Summary: Two controls are required for autonomous vehicle: 1) This is the project of the online course "Introduction to Self-Driving Cars" provided by University of Toronto on This is the final final project from the Introduction to Self Driving Cars (Course 1) of the Self Driving Cars Specialization on ...
Coursera Longitudinal And Lateral Controller - Detailed Analysis & Overview
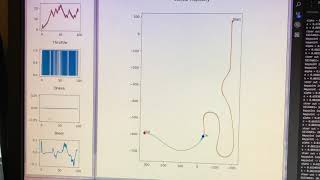
Two controls are required for autonomous vehicle: 1) This is the project of the online course "Introduction to Self-Driving Cars" provided by University of Toronto on This is the final final project from the Introduction to Self Driving Cars (Course 1) of the Self Driving Cars Specialization on ... TL;DR: Artificial Neural Networks controlers (Deep Learning controlers) perform better than classical methods in highly coupled ... Just completed the final project of the 7-weeks self driving car course offered by the University of Toronto in Lateral and Longitudinal Control of an Autonomous Car: CARLA simulation
This video shows the solution of my project for the Self-Driving Cars Course 1 of the specialization available on This video is the result of Final Project: Self-Driving Vehicle This is an assignment from Self-Driving Cars Specialization on This is the final project in the online course - Introduction to Self Driving Cars, offered by University of Toronto in