Media Summary: This work appears in the proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2017. Authors ... Title: Direct LiDAR-Inertial Odometry: Lightweight LIO with This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ...
Approximately Optimal Continuous Time Motion - Detailed Analysis & Overview
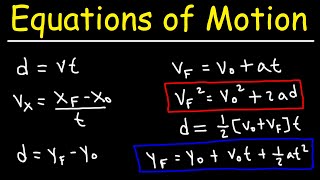
This work appears in the proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2017. Authors ... Title: Direct LiDAR-Inertial Odometry: Lightweight LIO with This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ... In this video, we dive into the concept of This physics video tutorial provides a basic introduction into equations of This is a crash course in dynamic optimization for economists consisting of three parts. Part 1 discusses the preliminaries such as ...
Speed, velocity, and acceleration can be confusing concepts, but if you have a few minutes, I'll clear it all up for you. Score high ... Guest lecture for CSCI5551 (Introduction to Intelligent Robotic Systems) Spring 2024 at The University of Minnesota - Twin Cities ... Things don't always move in one dimension, they can also move in two dimensions. And three as well, but slow down buster! This work appears in the proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2016. Authors ...