Media Summary: Recorded video of the presentation given at the IEEE/RSJ International Conference in Intelligent Robots and Systems 2023 in ... This paper addresses the on-line minimum-time ICRA 2020 Presentation of “GOMP: Grasp-
An Optimal Motion Planning Framework - Detailed Analysis & Overview
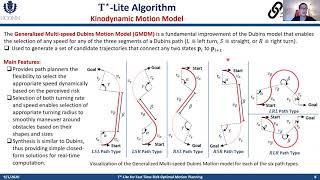
Recorded video of the presentation given at the IEEE/RSJ International Conference in Intelligent Robots and Systems 2023 in ... This paper addresses the on-line minimum-time ICRA 2020 Presentation of “GOMP: Grasp- This is my oral presentation for our paper BLIT* at the IEEE International Conference on Robotics and Automation (ICRA) 2025. T*-Lite: A Fast Time-Risk Optimal Motion Planning Algorithm for Multi-Speed Autonomous Vehicles In this video, we demonstrate a novel modular
Multiple mobile manipulators show superiority in the tasks requiring mobility and dexterity compared with a single robot, ... This is my talk for the fully virtual 2021 ACC in New Orleans, LA. Always have a backup in case of technical difficulties! You can ... MIT - February 21, 2025 Speaker: Zac Manchester Seminar title: Composable Optimization for Robotic In this scenario, Baxter required to retrieve target object from clutter. To de-clutter, objects picked and placed in storage; large ... This project discusses a real-time implementation of a hierarchical model predictive control (MPC) This simulation demonstrates the status of Use Case 2 in the AORTA project, a Vinnova-sponsored initiative highlighting the ...
Simon Zimmermann, Ghazal Hakimifard, Miguel Zamora, Roi Poranne, Stelian Coros ICRA + RAL 2020.