Media Summary: This video presents results on autonomous exploration and This work presents the results of the development of In January 2012, the United States Department of Transportation (USDOT) awarded
A Multi Modal Mapping Unit - Detailed Analysis & Overview
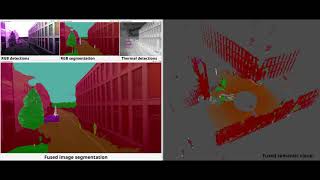
This video presents results on autonomous exploration and This work presents the results of the development of In January 2012, the United States Department of Transportation (USDOT) awarded Video Teaser for Simon Bultmann, Jan Quenzel and Sven Behnke: "Real-Time Modern logistics depends on more than movement. It depends on connection. Multi modal application "Map for the Blind" with Novint Falcon
You can follow us on: www.esrf.eu twitter.com/esrfsynchrotron ... Join the AI Evals September 2026 cohort: Brian Bishoff spent years ... Public online lecture series “Mobility analysis and planning for human-scale cities” 2026 The lecture series organised by the ...