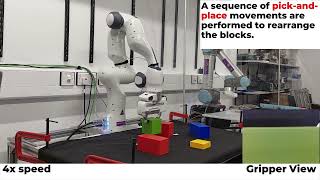
Media Summary: In this video, Michael Bartczak explains how to simulate and code the gripper (end-effector) and Justin's Linkedin account is given here: In this video, Justin Carmona, explains how to ... Development of a 4-DOF serial robotic manipulator designed for
Pick And Place Tasks Using - Detailed Analysis & Overview
In this video, Michael Bartczak explains how to simulate and code the gripper (end-effector) and Justin's Linkedin account is given here: In this video, Justin Carmona, explains how to ... Development of a 4-DOF serial robotic manipulator designed for In this captivating video, we showcase the remarkable capabilities of our Parallel SCARA robot, designed for optimal efficiency ... MIT MechE researchers introduce an approach called SimPLE (Simulation to Do you want to automatize industrial processes
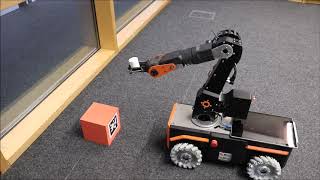
Control Lab project 2022 by Angelo D'Amante, Lorenzo Falai. To find out more about the project visit ... The mobile platform is based on 4 mecanum wheels, allowing omnidirectional motion. The mounted six axis robot arm is ... In this video, I'll show you how to program a really basic